Στόχος της Ενότητας Εργασίας είναι η αποτύπωση της αποθήκης με τη χρήση φορητών συσκευών και η απεικόνισή της σε τρισδιάστατη μορφή και η ολοκλήρωση με λογισμικό WMS της Entersoft. Πιο συγκεκριμένα, ο χρήστης κρατώντας την Tango συσκευή, σαρώνει την αποθήκη και δημιουργείται ένα πλέγμα (occupancy grid) που αναπαριστά το περίγραμμα του χώρου. Τα δεδομένα του περιγράμματος των 2 διαστάσεων αποθηκεύονται σε αρχεία μορφής json. Αναλυτικότερα, στο αρχείο αυτό περιέχονται πληροφορίες όπως: οι διαστάσεις της αποθήκης, οι διαστάσεις και θέσεις των εκάστοτε ραφαριών στο φυσικό χώρο (x,y,z), η ραφαρία στην οποία ανήκει η κάθε θέση αποθήκευσης, και τα περιεχόμενα της, καθώς επίσης και οι διάδρομοι με τα χαρακτηριστικά τους (θέση, μήκος) . Η παραπάνω διαδικασία έχει υλοποιηθεί και σε περιβάλλον ROS (Robot Operating System), εάν δεν υπάρχει διαθέσιμη μια Tango συσκευή.
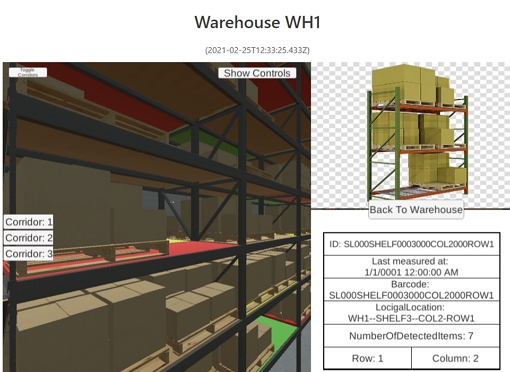
Στην περίπτωση αυτή, πρέπει να υπάρχει διαθέσιμη μια LIDAR (LIght Detection And Ranging) συσκευή, ικανή για την παραγωγή νέφους σημείων. Ο χρήστης κρατώντας την συσκευή σαρώνει την αποθήκη και συλλέγει νέφη σημείων. Επίσης, για την διαδικασία της συλλογής, μπορεί να χρησιμοποιηθεί drone. Έχει υλοποιηθεί υποσύστημα για την δυνατότητα αυτόνομης πλοήγησης της συσκευής αναγνώρισης (motion device) σε εσωτερικό άγνωστο χώρο, για την συλλογή δεδομένων τύπου pointcloud. Τέλος, σε κάθε περίπτωση, μετά από επεξεργασία των συλλεγόμενων σημείων ( καθάρισμα, ομαδοποίηση) παράγεται το json αρχείο της αναπαράστασης της αποθήκης, όπως και με την Tango συσκευή. Λαμβάνοντας τις παραπάνω πληροφορίες παράγεται μια ρεαλιστική 3D αναπαράσταση της αποθήκης (wireframe), μέσω της οποίας ο χρήστης έχει τη δυνατότητα να περιηγηθεί είτε με τα βέλη του πληκτρολογίου (μπροστά, πίσω, δεξιά, αριστερά), είτε με τη ροδέλα του ποντικιού (zoom in/out). Ο χρήστης επιλέγοντας μια θέση αποθήκευσης, μπορεί να ελέγξει το περιεχόμενο σε 2D αναπαράσταση (πιο πρόσφατη φωτογραφία του αποθηκευτικού χώρου) καθώς επίσης και τα αποτελέσματα της διαδικασίας της καταμέτρησης του αποθέματος για το συγκεκριμένο ράφι (πλήθος αντικειμένων και barcode αυτών). Τέλος, όλη η 3D αναπαράσταση της αποθήκης έχει υλοποιηθεί σε web περιβάλλον. Η εταιρία (Entersoft) ολοκλήρωσε τις ενέργειές της στην ΕΕ3 στο 100%. Συγκεκριμένα υλοποίησε αρχιτεκτονικό σχεδιασμό επικοινωνιών μεταξύ του WMS και των υποσυστημάτων του WMS+AR έγινε σχεδιασμός data model για τις μετρήσεις καθώς και τα απαραίτητα στοιχεία του Interface με το WMS+AR υποσύστημα .Υλοποιήθηκε η Ανάπτυξη των οντοτήτων στο WMS για να υποδεχθούν δεδομένα και επικοινωνίες με το WMS+AR.
Με στόχο την αποτύπωση της πληροφορίας των αποθεμάτων σε τρισδιάστατα μοντέλα μέσω ενός ενοποιημένου λογισμικού, η συγκεκριμένη ενότητα λαμβάνει ως δεδομένα τα αποτελέσματα της ΕΕ5 (Αυτόματη Καταμέτρηση Αποθεμάτων) και συγκεκριμένα τις μετρήσεις των αντικειμένων που βρίσκονται στα εκάστοτε ράφια και τροφοδοτεί με τις πληροφορίες αυτές την ΕΕ3 (Τρισδιάστατη Μοντελοποίηση Αποθηκευτικών Χώρων), ενημερώνοντας αναλόγως το json αρχείο της αποθήκης, προκειμένου να αποτυπωθεί η πληροφορία των αποθεμάτων σε τρισδιάστατα μοντέλα. Πιο συγκεκριμένα, κάθε αντικείμενο του αποθέματος του κάθε ραφιού αναπαρίσταται με ένα τρισδιάστατο κουτί. Το χρώμα του δαπέδου του κάθε αποθηκευτικού χώρου υποδεικνύει αν υπάρχει κάποιου είδους ασυμφωνία ανάμεσα στο αναμενόμενο και πραγματικό απόθεμα. Ειδικότερα, αν έχει πράσινο χρώμα σημαίνει ότι το συγκεκριμένο ράφι δεν έχει ασυμφωνίες, ενώ με το κίτρινο χρώμα το σύστημα υποδεικνύει ότι το αποτέλεσμα είναι αμφίβολο. Τέλος, το κόκκινο χρώμα σημαίνει ότι το ράφι έχει ασυμφωνίες
Όσον αφορά την ενοποίηση με το υπάρχον σύστημα (Entersoft WMS) έχει αναπτυχθεί ένα REST WEB API μέσω του οποίου επιστρέφεται η αφαιρετική 3D αναπαράσταση της αποθήκης σε JSON μορφή. Η τεκμηρίωση του WEB API βρίσκεται εδώ: http://195.251.210.147:3333/swagger/. Στο group “warehouses” της τεκμηρίωσης παρουσιάζεται η λειτουργικότητα που έχει αναπτυχθεί για τη λήψη της λίστας όλων των καταχωρημένων αποθηκών αλλά και την αναπαράσταση της συγκεκριμένης αποθήκης, ώστε να απεικονιστεί σε 3D μοντέλο η αποθήκη. Ο χρήστης επιλέγοντας μία από τις καταχωρημένες αποθήκες έρχεται σε επαφή με την τρισδιάστατη αναπαράσταση αυτής στην οποία μπορεί να περιηγηθεί (βλ. ΕΕ3) με στόχο να ελέγξει το απόθεμα του αποθηκευτικού χώρου της επιλογής του. Τέλος, παρέχεται και η δυνατότητα της “συγκεκριμένης εκκίνησης”. Ο χρήστης, δηλώνοντας την λογική θέση του χώρου αποθήκευσης που θέλει να επιβλέψει, με την συγκεκριμένη εκκίνηση, ξεκινάει την διάδρασή του με την τρισδιάστατη αναπαράσταση βλέποντας το ράφι της επιλογής του, χωρίς να χρειαστεί να περιηγηθεί. Η εταιρία (Entersoft) ολοκλήρωσε τις ενέργειές της στο 100% στην ΕΕ4. Συγκεκριμένα υλοποίησε την ενσωμάτωση web browser με contextual πληροφορία στις φόρμες του WMS της Entersoft για την παρουσίαση του 3D μοντέλου τη αποθήκης με συγχρονισμένη πληροφορία αποθεμάτων αλλά και φωτογραφιών κατά την καταμέτρηση. Επίσης, πραγματοποίησε σχεδίαση του συστήματος εμφάνισης βάσει context στο UI του WMS με στόχο ένα seamless UX.
Με στόχο την αυτόματη καταμέτρηση των αποθεμάτων ενός αποθηκευτικού χώρου, έχουν υλοποιηθεί τρεις αλυσιδωτές λύσεις όπου, όταν αποτύχει η προηγούμενη, αναλαμβάνει η επόμενη. Η Tango συσκευή, για κάθε αίτημα ενέργειας (action, βλ. Αλληλεπίδραση με WMS ), αποστέλλει στον server για επεξεργασία μία φωτογραφία και ένα pointcloud. Οι λύσεις και η σειρά εκτέλεσής τους είναι:
Αποτελεί την πρώτη “απόπειρα” αυτόματης καταμέτρησης των αντικειμένων ενός ραφιού. Έχοντας μια φωτογραφία ενός storage location, εφαρμόζονται φίλτρα όπως grayscale και Sobel για να εντοπιστούν barcodes. Στη συνέχεια γίνεται ανάγνωση αυτών και με αλγοριθμικό τρόπο βγαίνει το πλήθος των αποθεμάτων ως αποτέλεσμα. Επίσης, ό,τι πληροφορία “κουβαλάνε” τα αναγνωσμένα barcode επιστρέφεται στο αποτέλεσμα. Φθαρμένοι γραμμωτοί κωδικοί, παράγοντες του περιβάλλοντος όπως φωτισμός, και θολές φωτογραφίες έχουν ως αποτέλεσμα να μην αναγνωριστούν και αναγνωστούν γραμμωτοί κωδικοί. Χρόνος εκτέλεσης 0.25 - 1 δευτερόλεπτα.
Εάν αποτύχει η ανάγνωση γραμμωτού κωδικού, αναλαμβάνει η αναγνώριση αντικειμένων. Η αυτόματη καταμέτρηση αποθεμάτων επομένως, μπορεί να επιτευχθεί εκπαιδεύοντας νευρωνικά δίκτυα να αναγνωρίζουν συγκεκριμένα αντικείμενα σε φωτογραφίες. Αποτέλεσμα αυτής της λύσης είναι το πλήθος των αντικειμένων και όποια άλλη πληροφορία παρείχαμε κατά της διαδικασία εκπαίδευσης (όνομα αντικειμένου, διαστάσεις κτλ), καθώς και η βεβαιότητα του μοντέλου για την κάθε αναγνώριση.
Η μέθοδος αυτή ενδείκνυται για αποθήκες όπου το πλήθος των διαφορετικών αντικειμένων που αποθηκεύει είναι σχετικά μικρό, διότι η εκπαίδευση ενός μοντέλου απαιτεί αφενός, σύνολο δεδομένων και αφετέρου διαδικασία εκπαίδευσης. Το σύστημα παρέχει την δυνατότητα εκπαίδευσης ενός νέου μοντέλου αναγνώρισης αντικειμένου. Χρόνος εκτέλεσης 0.5 - 2 δευτερόλεπτα.
Αποτελεί την τελευταία σε σειρά λύση όταν έχει αποτύχει η ανάγνωση barcode αλλά και το object detection. Η διαδικασία είναι η εξής: λήψη δεδομένων τύπου pointcloud του περιβάλλοντος, σε πραγματικό χρόνο που παρέχονται από μία Tango ή LIDAR συσκευή και εφαρμογή αλγορίθμων για point cloud segmentation πάνω σε αυτά. Η μέθοδος αυτή παρόλο που δεν είναι επηρεάζεται από παράγοντες του περιβάλλοντος (πχ φωτεινότητα), όπως οι προηγούμενες μέθοδοι, είναι πολύ ευαίσθητη στην παραμετροποίηση. Θέτοντας τις σωστές παραμέτρους είναι κρίσιμο καθώς επηρεάζεται η ποιότητα και ακεραιότητα των αποτελεσμάτων. Ως αποτέλεσμα επιστρέφεται ο όγκος που καταλαμβάνεται από τα αντικείμενα που βρίσκονται πάνω στο ράφι και ο αριθμό τους. Χρόνος εκτέλεσης 1 - 3 δευτερόλεπτα.
Στο τέλος των παραπάνω ενεργειών, ενημερώνεται το json αρχείο με τα αποτελέσματα των μετρήσεων για τον κάθε χώρο αποθήκευσης, με στόχο την αποτύπωσή τους σε τρισδιάστατα μοντέλα
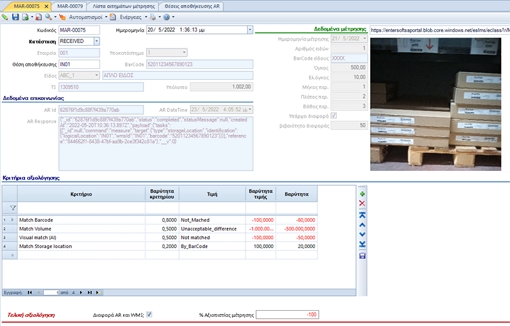
Από την πλευρά του Entersoft WMS, αναπτύχθηκε υποσύστημα scoring για την αξιολόγηση της μετρούμενης πληροφορίας, έτσι ώστε να μπορεί να παρουσιάζεται στο χρήστη ανά παρακολουθούμενο storage location αφενός η ανίχνευση ή όχι εξαίρεσης, αφετέρου ο βαθμός βεβαιότητας. Η εξαίρεση προκαλείται εφόσον το εκτιμώμενο πλήθος και barcode συμφωνεί με το περιεχόμενο της θέσης που έχει το WMS για της χρονική στιγμή που παραγγέλθηκε το Action της μέτρησης. Στην περίπτωση που υπάρχουν κινήσεις στο απόθεμα του WMS για τη θέση μετά τη μέτρηση – η θέση αναφέρεται ως μη επιβεβαιωμένη. To score βεβαιότητας εκτιμάται βάσει παραμετρικών κανόνων που είτε βασίζονται σε παραμετρική βαθμολόγηση της βαρύτητας, είτε με την εφαρμογή λογικών κανόνων όπως πχ αν έχει ανιχνευθεί barcode που συμφωνεί και δεν συμφωνεί ο όγκος κλπ. Οι κανόνες μπορούν να υλοποιηθούν βάσει είτε lookup-λογικής είτε βάσει λογικής σε vb.net expressions Κατά τη διάρκεια των δοκιμών παρουσιάστηκαν προβλήματα σε σχέση με το επίπεδο αξιοπιστίας των μετρούμενων μεγεθών, λόγω αδυναμίας ανάγνωσης barcodes, εκτίμησης βάθους – όγκου, προβλημάτων φωτισμού ή πραγματικών συνθηκών στην αποθήκη πχ εμπόδια). Η αντιμετώπιση των παραπάνω κρίνεται εκτός πλαισίων του τρέχοντος έργου, το οποίο έχει ως κύριο στόχο την επιβεβαίωση της εφικτότητας και της τεχνολογικής ωριμότητας προκειμένου να αιτιολογηθούν οι επενδύσεις για ανάπτυξη τελικών προίόντων.
Στην ενότητα αυτή έχει υλοποιηθεί διεπαφή μέσω της οποίας, ο χρήστης αφού δηλώσει μία λίστα με τις λογικές θέσεις από τους χώρους αποθήκευσης που επιθυμεί να επισκεφθεί και το σημείο εκκίνησης, επιστρέφεται η σειρά με την οποία πρέπει να τα επισκεφθεί ώστε να διανύσει όσο το δυνατό μικρότερη απόσταση και να επιστρέψει στο σημείο εκκίνησης.
Το παραπάνω πρόβλημα είναι γνωστό στην επιστήμη των υπολογιστών ως Πρόβλημα του Πλανόδιου Πωλητή (TSP). Λόγω της υψηλής πολυπλοκότητας ( O(n!) ), για την εύρεση του συντομότερου μονοπατιού υιοθετήθηκε λύση βασισμένη σε γενετικό αλγόριθμο. Ο γενετικός αλγόριθμος αποτελεί μία ευριστική λύση στο παραπάνω πρόβλημα, γεγονός που συνεπάγεται ότι το αποτέλεσμα δεν αποτελεί την βέλτιστη λύση, αλλά ένα τοπικό μέγιστο, το οποίο αποτελεί μια αποδεκτή και κοντά στην καλύτερη, λύση. Ανάλογα με την ποιότητα των αποτελεσμάτων που επιθυμεί ο χρήστης, ορίζονται οι παράμετροι. Οι χρόνοι εκτέλεσης είναι από 1 – 30 δευτερόλεπτα, με προκαθορισμένο κατώφλι στα 5 δευτερόλεπτα. Βάσει μετρήσεων, σε αυτό το χρόνο τα αποτελέσματα είναι απολύτως ικανοποιητικά. Από 5 και έπειτα δεν έχουν ουσιαστική διαφορά, ενώ από 5 και κάτω αποτελούν βεβιασμένη/μη ποιοτική λύση.
Ως προς το Entersoft WMS, στα πλαίσια της βελτιστοποίησης των διαδικασιών φόρτωσης / εκφόρτωσης αποθεμάτων από / σε θέσεις σε μια αποθήκη, η χρήση των τεχνολογιών επαυξημένης πραγματικότητας έγινε ορατό ότι μπορεί να βοηθήσει σημαντικά στην μείωση των χρόνων που απαιτούνται για να εκτελεστούν οι εργασίες, να συμβάλλει στην μείωση των σφαλμάτων, παρέχοντας σε πραγματικό χρόνο στον πόρο που εκτελεί τις εργασίες, την απεικόνιση όλων των απαραίτητων πληροφοριών, καθοδηγώντας τον στην ολοκλήρωση και χωρίς λάθη εκτέλεσή τους, συμβάλλοντας ώστε η επιχείρηση να έχει μειωμένο διαχειριστικό κόστος από πιθανά λάθη.
Ύστερα από την σε βάθος έρευνα και μελέτη, η πλατφόρμα σε επίπεδο λογισμικού σαν λειτουργικό σύστημα που επιλέχθηκε για να αποτελέσει την βάση επάνω στην οποία αναπτύχθηκαν οι λύσεις με χρήση επαυξημένης πραγματικότητας ήταν το λειτουργικό Android. Πρόκειται για ένα ανοιχτό λειτουργικό σύστημα, διατίθεται σε ένα πολύ μεγάλο πλήθος mobile συσκευών και βιομηχανικού τύπου, με πάρα πολλές δυνατότητες σε επίπεδο υλικού και δυνατοτήτων, κάτι που είναι πολύ σημαντικό λόγω των ειδικών απαιτήσεων που απαιτούν οι τεχνολογίες επαυξημένης πραγματικότητας. Αναπτύχθηκε λοιπόν ο RF Renderer ώστε να εκτελείται και στο λειτουργικό Android. Ο RF Renderer είναι το λογισμικό το οποίο έχει την αρμοδιότητα της εμφάνισης όλων των απαραίτητων πληροφοριών, όπως επίσης αναλαμβάνει και την αλληλεπίδραση με τον χρήστη για την εκτέλεση των ροών εργασίας που απαιτούνται στην αποθήκη.
Μέσω της τρισδιάστατης μοντελοποίησης του αποθηκευτικού χώρου, το σύστημα γνωρίζει με ακρίβεια τις αποστάσεις μεταξύ των θέσεων και στις τρεις διαστάσεις. Με αυτόν τον τρόπο και ανάλογα την διαμόρφωση του αποθηκευτικού χώρου αναπτύχθηκαν οι κατάλληλοι αλγόριθμοι, ώστε το σύστημα λογισμικού λαμβάνοντας υπόψη ένα σύνολο κανόνων και περιορισμών που μπορούν με σαφήνεια να οριστούν και να αποτυπωθούν, όπως ενδεικτικά χωροταξικοί περιορισμοί, περιορισμοί κατεύθυνσης, κανόνες γειτνίασης θέσεων, περιορισμοί εφικτότητας και ικανότητας προσέγγισης σε μια θέση, βρίσκει και προτείνει μία βέλτιστη διαδρομή εκτέλεσης των εργασιών και ταυτόχρονα το κατάλληλο μέσο μετακίνησης αν και εφόσον απαιτείται κάτι τέτοιο.
Η αποτύπωση πληροφορίας των τρεχόντων αποθεμάτων σε τρισδιάστατα μοντέλα σε πραγματικό χρόνο, έδωσε στο σύστημα την δυνατότητα να παρέχει στον χρήστη σε συνδυασμό με την φυσική του θέση, αλλά και καθώς μετακινείται στον χώρο, την οπτική απεικόνιση με κατάλληλες ενδείξεις και χρωματισμούς του σε ποιες συγκεκριμένες θέσεις στους διαδρόμους της αποθήκης έχει να φορτώσει ή να εκφορτώσει απόθεμα. Αυτή η δυνατότητα αποτελεί την υλοποίηση των γνωστών στον χώρο των αποθηκών Pick 2 Light λειτουργιών που υλοποιούνται παραδοσιακά με εξειδικευμένο υλικό και εξαρτήματα που τοποθετούνται επάνω στα ράφια και τις θέσεις αποθήκευσης. Το σύστημά μας και η λύση μας παρέχει την δυνατότητα μέσω της επαυξημένης πραγματικότητας χωρίς να απαιτείται ο εξειδικευμένος αυτός εξοπλισμός, μηδενίζοντας το κόστος απόκτησης αλλά και συντήρησης ενός τέτοιου εξοπλισμού. Ταυτόχρονα ο περιορισμός που το ίδιο το παραδοσιακό υλικό μιας Pick 2 Light λειτουργίας έχει ως προς την ταυτόχρονη αποτύπωση εργασιών για παραπάνω από έναν πόρους της αποθήκης, είναι κάτι που η λύση μας έχει ξεπεράσει παρέχοντας στον κάθε χρήστη την δυνατότητα της οπτικής απεικόνισης των δικών του ξεχωριστών ενδείξεων για τις εργασίες που του έχουν ανατεθεί. Κάτι τέτοιο παρέχει στην επιχείρηση την δυνατότητα της παράλληλης εκτέλεσης πολλαπλών εργασιών στον χώρο των αποθηκών, ακόμη και στις ίδιες θέσεις από διαφορετικούς χρήστες ταυτόχρονα, κάτι που δεν είναι εφικτό με το παραδοσιακό Pick 2 Light εξοπλισμό, συμβάλλοντας έτσι στην αύξηση της παραγωγικότητας και στην μείωση του χρόνου εκτέλεσης των εργασιών και κατ’ επέκταση στην πιο γρήγορη εξυπηρέτηση των παραγγελιών και αποστολών.
Η σωστή και ακριβής καθοδήγηση κατά την εκτέλεση των εργασιών σε μια αποθήκη είναι ένας τομέας επάνω στον οποίο επίσης επενδύσαμε. Παραδοσιακά οι εφαρμογές μέσω κατάλληλων ροών ζητούν από τον χρήστη να επιβεβαιώσει και να δηλώσει τα στοιχεία του αποθέματος και της θέσης που επισκέπτεται κάθε φορά, μέσω κατάλληλων πεδίων στις οθόνες της συσκευής που τρέχει το λογισμικό. Η συμπλήρωση αυτών των πληροφοριών και στοιχείων γίνεται καθώς ο χρήστης διαβάζει και αλληλοεπιδρά συνεχώς με την οθόνη της συσκευής που χρησιμοποιεί η εφαρμογή μέσω του λογισμικού, συμπληρώνοντας τα δεδομένα με την χρήση κατάλληλων scanners αλλά και με πληκτρολόγηση όπου απαιτείται. Εδώ μελετήσαμε την εμπειρία του χρήστη σε συνδυασμό με το τι μας παρέχει σήμερα η τεχνολογία, όπου το σύστημά μας εκμεταλλεύτηκε την τεχνολογία voice και με χρήση κατάλληλων ακουστικών, μέσω φωνητικών εντολών καθοδήγησης, βοηθάει τον χρήστη ως προς το που και πως πρέπει να κινηθεί μέσα στην αποθήκη για να εκτελέσει τις εργασίες του. Η λύση βασίστηκε επάνω στην τρισδιάστατη μοντελοποίηση των αποθηκευτικών χώρων και το σύνολο κανόνων και περιορισμών που έχουν οριστεί σε ότι αφορά την περιήγηση μέσα στον χώρο της αποθήκης. Επιπλέον όπου ζητείται η συμπλήρωση στοιχείων, ο χρήστης δεν χρειάζεται απαραίτητα να διαβάζει την οθόνη της συσκευής του, διότι αυτό που ζητείται κάθε φορά να συμπληρωθεί, ακούγεται μέσω κατάλληλης φωνητικής εντολής. Έτσι ο χειριστής είναι συγκεντρωμένος στο να εκτελεί τις εργασίες του χωρίς να αποσπάται η προσοχή του κοιτώντας συνεχώς την οθόνη του για να καταλάβει τι ζητείται να συμπληρωθεί. Έτσι ο χειριστής επικεντρώνεται στην συμπλήρωση των στοιχείων που η φωνητική εντολή του ζητάει κάθε στιγμή στην ροή της εργασίας. Σε ροές όπου απαιτείται η συμπλήρωση πολλών πληροφοριών σχετικών με το απόθεμα της θέσης σε μια εργασία, υποστηρίχθηκε η δυνατότητα της φωτογραφίας με χρήση κάμερας. Το σύστημα μέσω οπτικής αναγνώρισης από την εικόνα έχει την ικανότητα να αναγνωρίζει πολλές πληροφορίες και χρησιμοποιεί όσες από αυτές αναγνωρίζει και απαιτούνται να συμπληρωθούν στην ροή της εργασίας, μειώνοντας το πλήθος των κινήσεων και στοιχείων που απαιτούνται να δηλωθούν από τον χρήστη. Η δυνατότητα αυτή οδηγεί στην πιο γρήγορη εκτέλεση των εργασιών χωρίς να αποσπάται η προσοχή του χειριστή, ενώ αν υπάρξει κάποιο λάθος κατά την συμπλήρωση των στοιχείων ο χειριστής ενημερώνεται μέσω κατάλληλων ενημερωτικών φωνητικών μηνυμάτων, ώστε να προβεί στις κατάλληλες διορθωτικές ενέργειες.
Μέσω της αξιοποίησης των ερευνητικών αποτελεσμάτων του έργου επιτυγχάνεται η μεγιστοποίηση του οφέλους που προκύπτει από τις δραστηριότητες έρευνας και ανάπτυξης για την κοινωνία και την οικονομία ενός κράτους, επιστρέφοντας έτσι την επένδυση του κράτους στον τομέα της έρευνας προς την ίδια την αγορά και την κοινωνία.
Η εμπορική αξιοποίηση και εμπορική εκμετάλλευση των ερευνητικών αποτελεσμάτων του έργου WMS & AR, αποτελεί κρίσιμη διαδικασία και παράγοντα επιτυχίας του. Στόχος είναι να δημιουργήσει μελλοντικά οικονομικά οφέλη σε όλους τους εταίρους του έργου.
Σε μακροπρόθεσμο επίπεδο, το έργο WMS & AR επιθυμεί να συμβάλλει στην ευρύτερη οικονομική και κοινωνική ανάπτυξη του κράτους, στη δημιουργία νέων και καλύτερων θέσεων εργασίας και επαγγελματικών ευκαιριών για τους νέους απόφοιτους και στη βελτίωση της ποιότητας της εργασίας μέσα από την αξιοποίηση των νέων προϊόντων – αποτελεσμάτων του.
“Towards a Remote Warehouse Management System”, 17th International Conference on Remote Engineering and Virtual Instrumentation (REV 2020) Athens, Georgia, U.S., pp: 338-348 Ioannis Stamelos, Charalampos Avratoglou, Panayotis Tzinis, George Kakarontzas, Alexander Chatzigeorgiou, Apostolos Ampatzoglou, Dimitris Folinas, Iakovos Stratigakis, Lampros Karavidas, Christina Volioti, Theodoros Amanatidis, Anastasia Deliga, Charalampos Dimitrakopoulos, Thrasyvoulos Tsiatsos
“A low-cost AR assistant component architecture for Warehouse Management Systems”, Panhellenic Conference on Informatics (PCI 2021), pp: 160-166 Iakovos Stratigakis, Theodoros Amanatidis, Christina Volioti, George Kakarontzas, Thrasyvoulos Tsiatsos, Ioannis Stamelos, Charalampos Avratoglou, Apostolos Ampatzoglou, Alexander Chatzigeorgiou, Dimitris Folinas
“Discrete event simulation of an automated warehouse inspection system with drones”, I. Antoniades, I. Stamelos, Thirteen IEEE International Conference on Information, Intelligence, Systems and Applications, 2022 (submitted)

Νέο ερευνητικό έργο για την Entersoft με στόχο την καινοτομία σε Συστήματα Διαχείρισης Αποθηκών (WMS) - Entersoft
Δείτε το δελτίο© 2022 Entersoft SA & Aristotle University of Thessaloniki. All rights reserved.